


?
什么是無人機避障技術
避障技術,即無人機自主躲避障礙物的智能技術。無人機自動避障系統能夠及時地避開飛行路徑中的障礙物,極大地減少因為操作失誤而帶來的各項損失。

無人機避障技術的發展階段
無人機只能是簡單地感知障礙物。當無人機遇到障礙物時,能快速地識別,并且懸停下來,等待無人機駕駛者的下一步指令。
無人機能夠獲取障礙物的深度圖像,并由此精確感知障礙物的具體輪廓,然后自主繞開障礙物,是擺脫飛手操作,實現無人機自主駕駛的階段。
無人機能夠對飛行區域建立地圖模型然后規劃合理線路,是目前無人機避障技術的最高階段。
這三個階段是無人機避障技術的作用過程。從無人機發現障礙物,到可以自動繞開障礙物,再達到自我規劃路徑的過程。
無人機避障類
紅外線避障的常見實現方式是三角測量原理。紅外感應器包含紅外發射器與CCD檢測器,通過發射紅外線在物體上進行反射,反射的光線被CCD檢測器接收之后,由于物體的距離D不同,反射角度也會不同,不同的反射角度會產生不同的偏移值L,知道了這些數據再經過計算,即能得出物體的距離了。
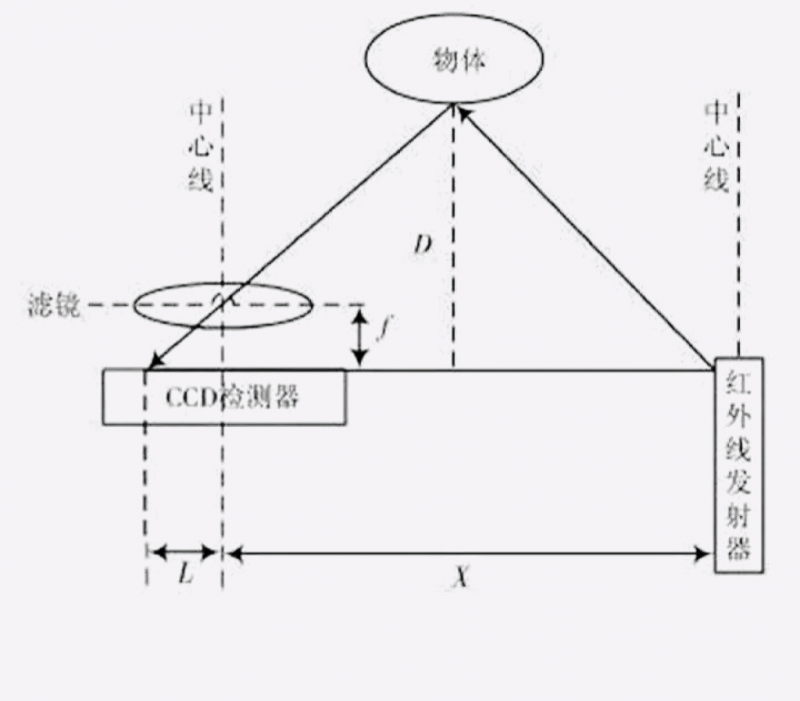
三角測量原理示意圖
超聲波避障
超聲波測距的原理是聲波遇到障礙物會反射,而聲波的速度已知,所以知道發射到接收的時間差,就能計算出測量距離,再結合發射器和接收器的距離,就能算出障礙物的實際距離。
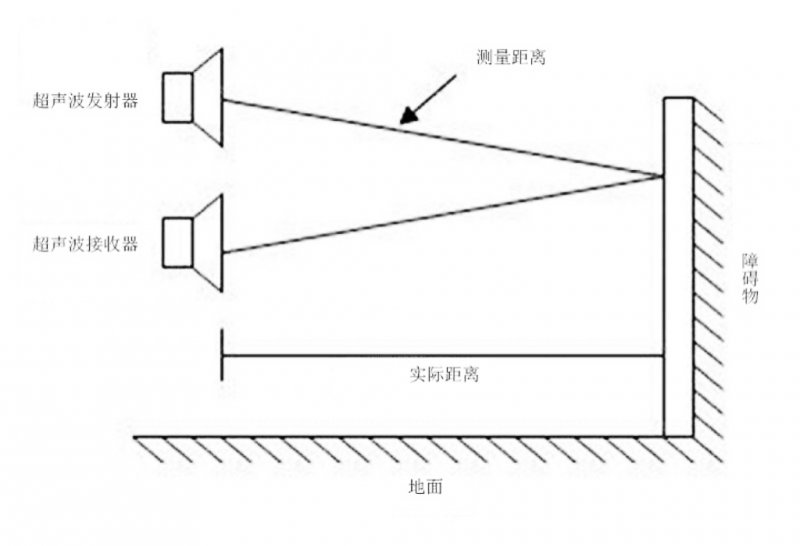
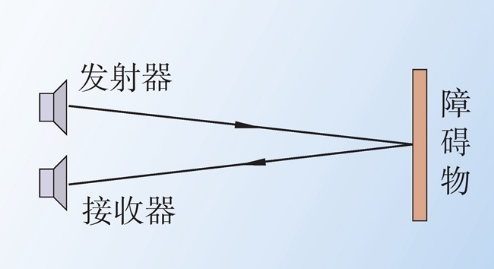
超聲波避障原理示意圖
激光避障與紅外線類似,也是發射激光然后接收。激光傳感器的測量方式很多樣,有類似紅外的三角測量,也有類似于超聲波的時間差+速度。
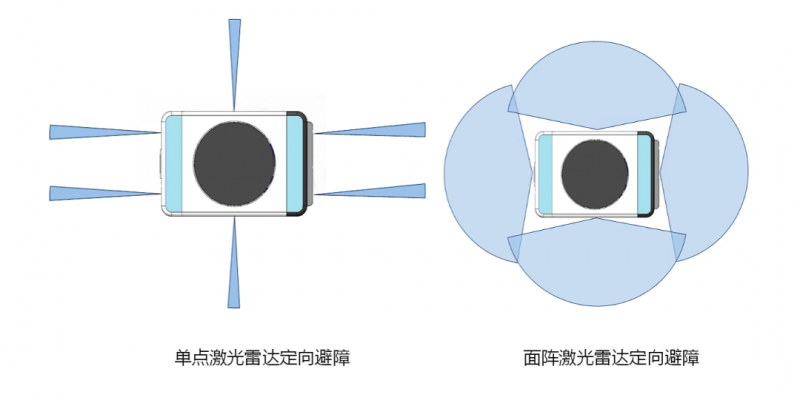
無論是哪種方式,激光避障的精度、反饋速度、抗干擾能力和有效范圍都要明顯優于紅外和超聲波。
解決機器人如何“看”的問題,即計算機視覺。其基礎在于如何能夠從二維的圖像中獲取三維信息,從而了解我們身處的這個三維世界。
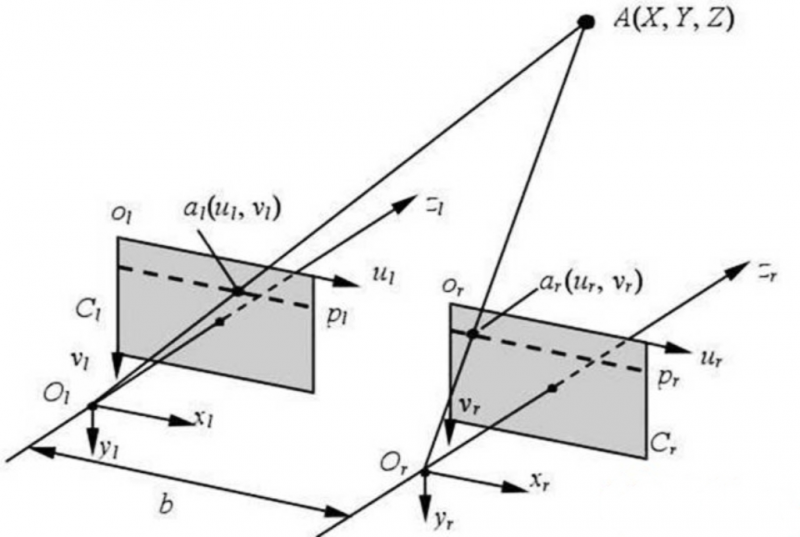
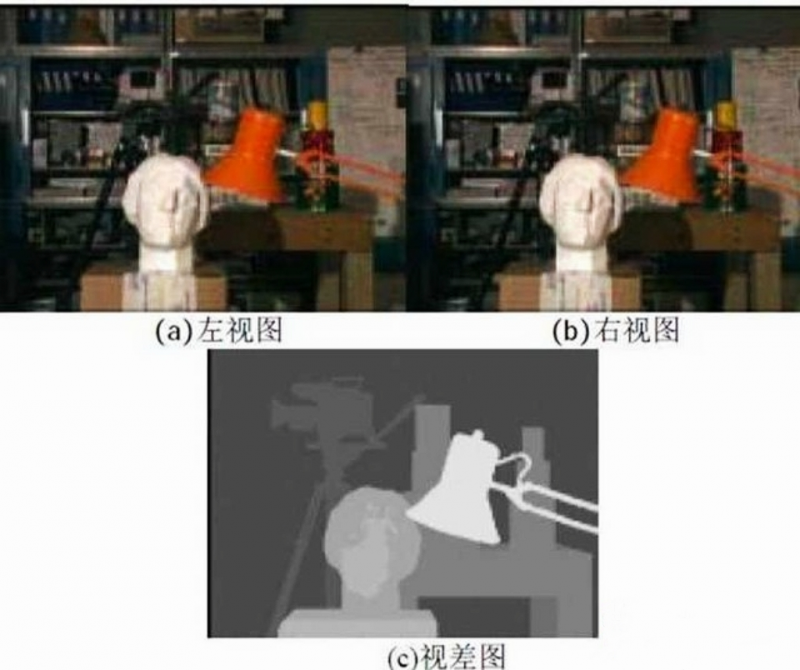
無人機雙目視覺避障示意圖
避障功能的普及是無人機行業發展的大勢所趨,在提升無人機作業場景廣度的同時,使無人機能夠適應更復雜嚴苛的飛行環境,高效智能完成任務需求。未來,結合多樣化的無人機避障技術,涵渦無人機將深度應用到各行業領域,讓無人機智能化更進一步。
“素材來源于網絡侵刪”
 品勝
品勝 新品發布|極飛 R150 2020 款農業無人車播撒版
新品發布|極飛 R150 2020 款農業無人車播撒版 【視頻直播中】極智領先·目視未來 2021極目科技年會
【視頻直播中】極智領先·目視未來 2021極目科技年會 【2月24日 19:00】《三農課堂》第30期—小麥中后期病蟲草害防治技術
【2月24日 19:00】《三農課堂》第30期—小麥中后期病蟲草害防治技術 XAAC 2020極飛科技年度大會新品發布會
XAAC 2020極飛科技年度大會新品發布會 新品發布|全新極飛 P 系列 2020 款農業無人機
新品發布|全新極飛 P 系列 2020 款農業無人機 新品發布|極飛 R150 2020 款農業無人車割草版
新品發布|極飛 R150 2020 款農業無人車割草版 承接邢臺地區飛防,吊運
承接邢臺地區飛防,吊運 大疆無人機專業打藥,接和田,喀什周圍,棉花,紅棗玉米打藥
大疆無人機專業打藥,接和田,喀什周圍,棉花,紅棗玉米打藥 保定周邊吊運打藥撒肥隨叫隨到
保定周邊吊運打藥撒肥隨叫隨到 海拉爾周邊飛防值保
海拉爾周邊飛防值保 四川及周邊無人機打藥,撒肥料,吊運
四川及周邊無人機打藥,撒肥料,吊運 大疆T40
大疆T40 飛機打藥 撒肥 播種
飛機打藥 撒肥 播種 無人機-植保/吊運
無人機-植保/吊運












